The six standard geometrical terms used by TPoint are described below. These terms quantify the various mechanical inaccuracies of the optical tube assembly (OTA) and telescope mount. Even the most expensive telescope mounts exhibit mechanical errors that ultimately affect the telescope pointing performance. Mechanical adjustments can be made to the telescope system to minimize the misalignments. However, eliminating them entirely is impossible, so telescope pointing can be improved through telescope modeling.
Figure 247: A German equatorial mount.
Figure 247 and Figure 248 show the two most popular telescope mount designs. The following discussions relate to equatorial mounted telescopes. The right ascension (RA) or hour angle (HA) axis is pointed closely to the celestial pole.
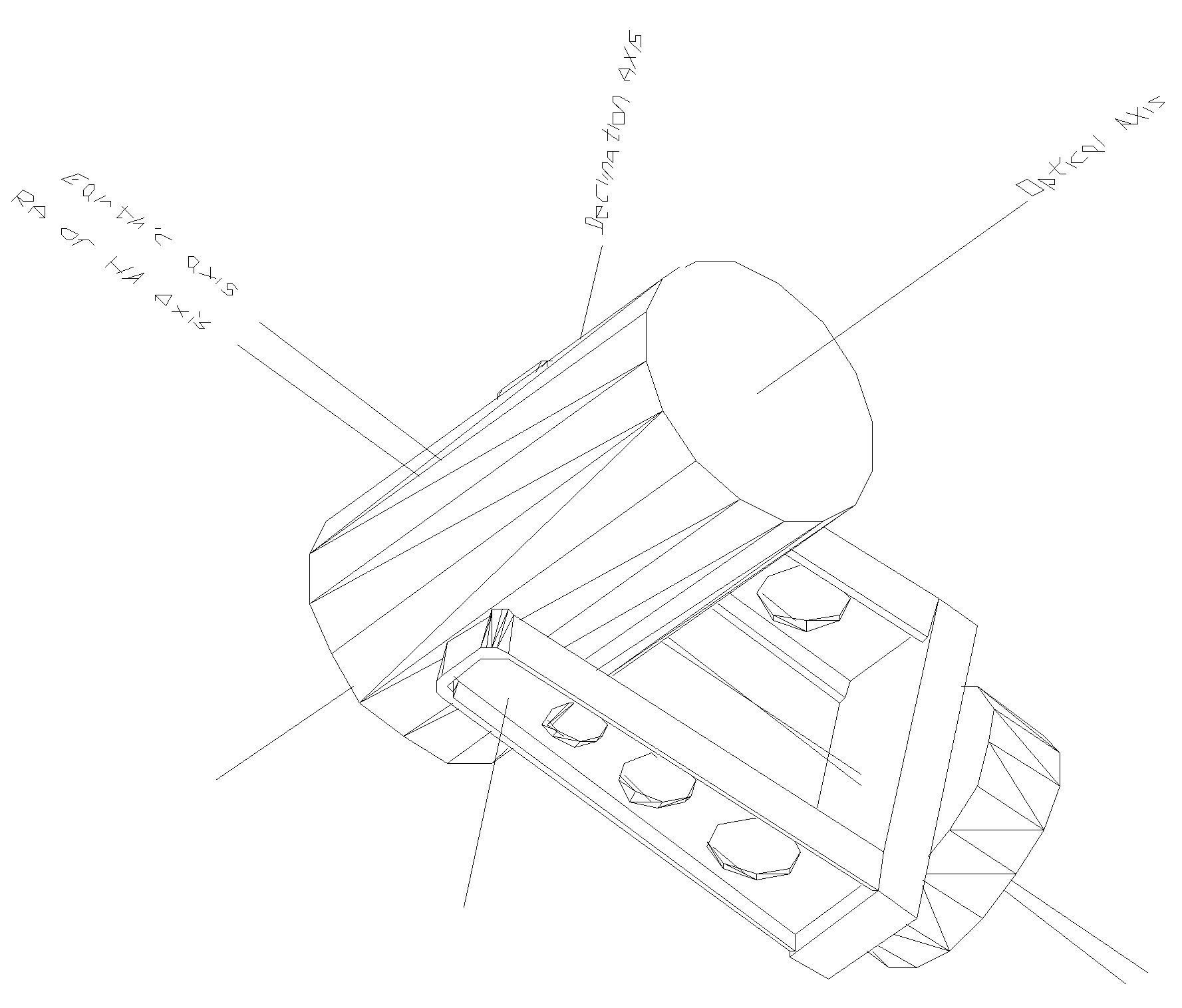
Figure 248: An equatorial fork mount.
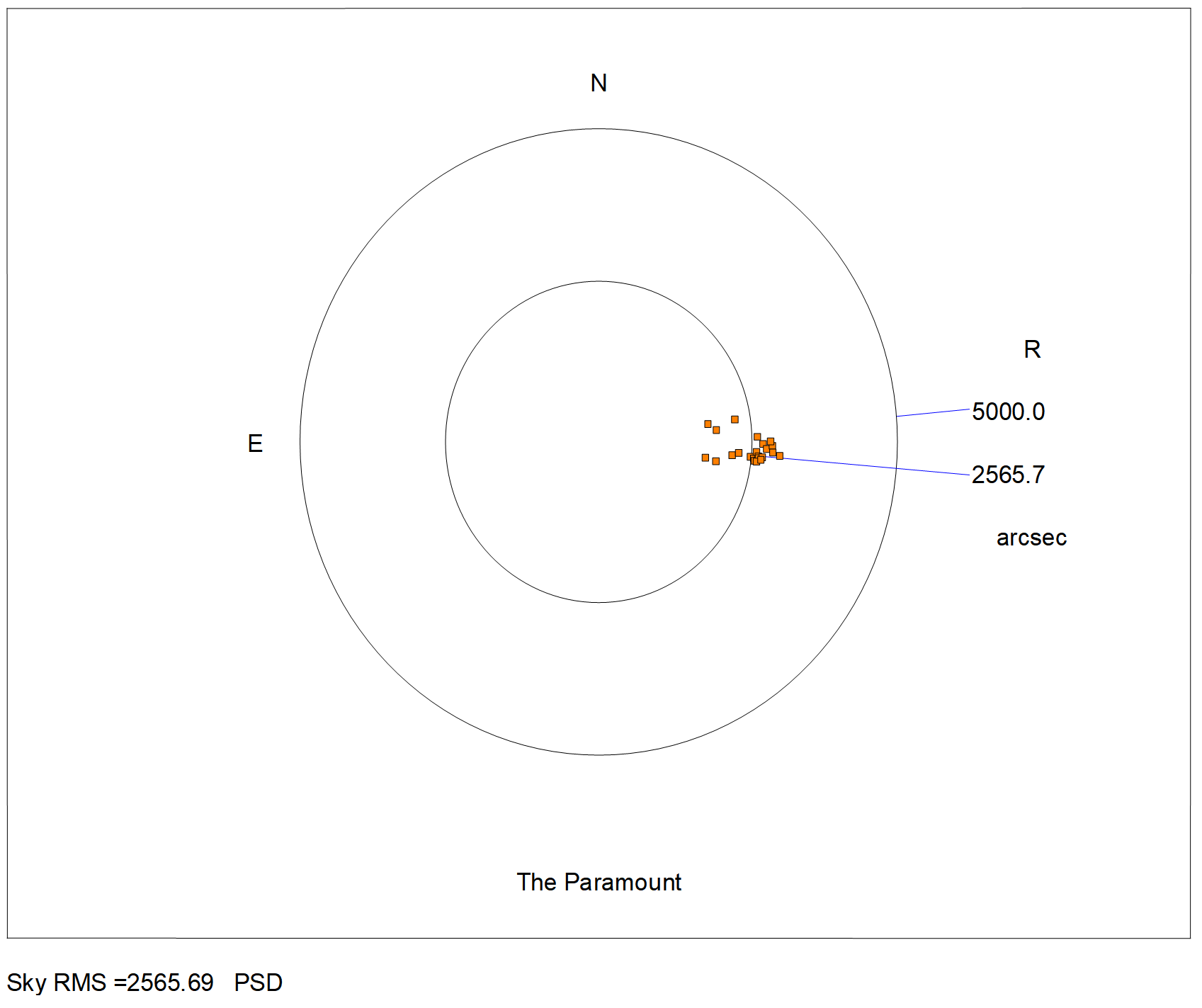
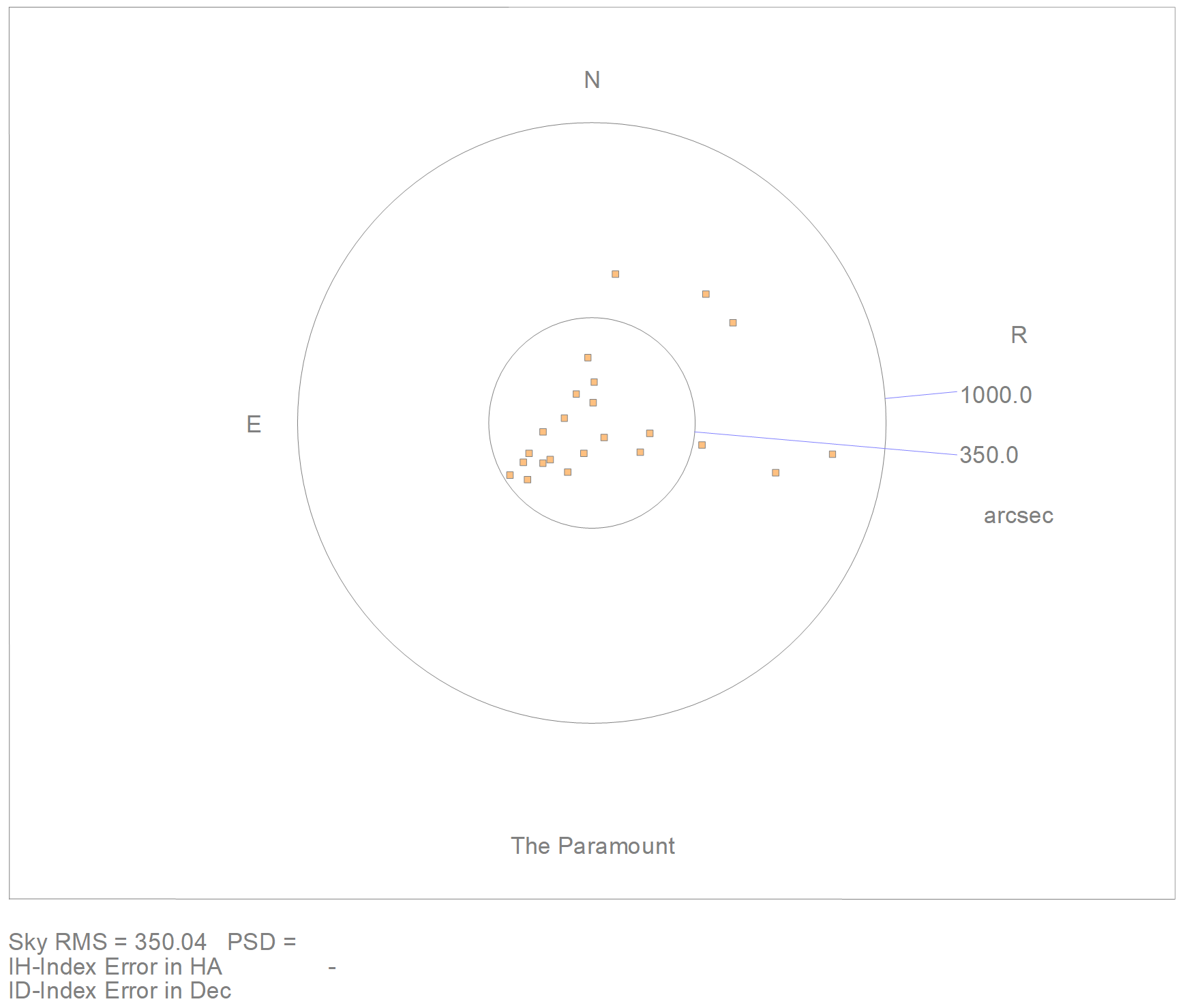
The index errors are simply offsets to the hour angle and declination values such that the distribution of pointing errors across the sky is best fit. Looking at the scatter plots below, you can see that adding index error terms to the model moves the entire data set towards the center, thereby improving the overall pointing. Since the control system is typically synchronized on a star by a sighting through the optical path of the telescope, this initial sighting is “polluted” by the errors in the system at the time of the sighting. Averaging all the pointing samples results in more accurate pointing.
Figure 249: Pointing data excluding the Index Error term. |
Figure 250: Pointing data including the Index Error term. |
To achieve repeatable pointing, the optical tube assembly must be rigidly attached to the mount so that no motion occurs between the two as the OTA is slewed about the sky. Ideally, the optical axis should also be perpendicular to the declination axis. In practice, this can be difficult to achieve by simple mechanical means since the true optical path probably does not coincide with the physical telescope tube.
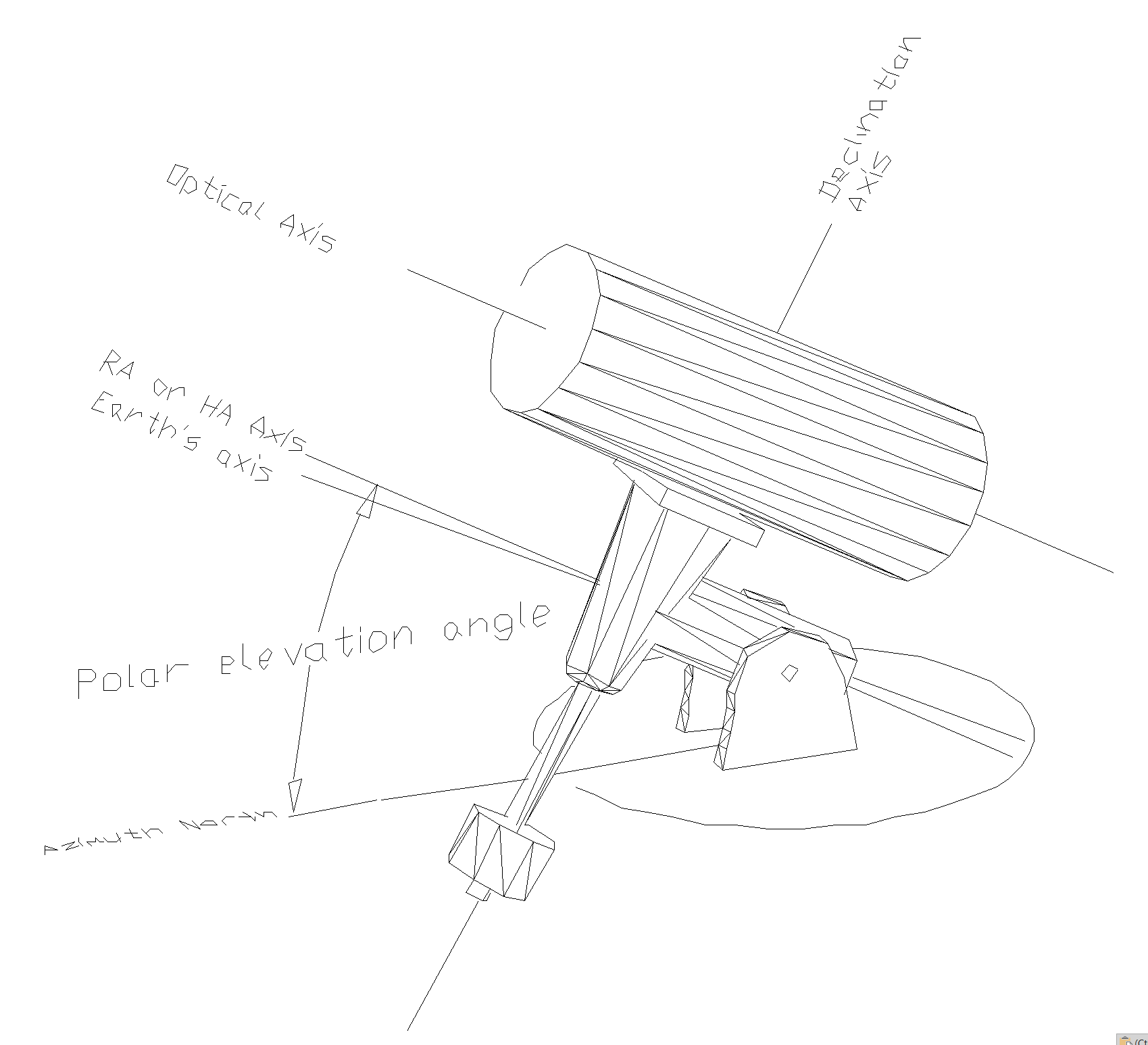
The following diagrams graphically illustrate the OTA/Declination axis term (CH) for two different telescope mounts.
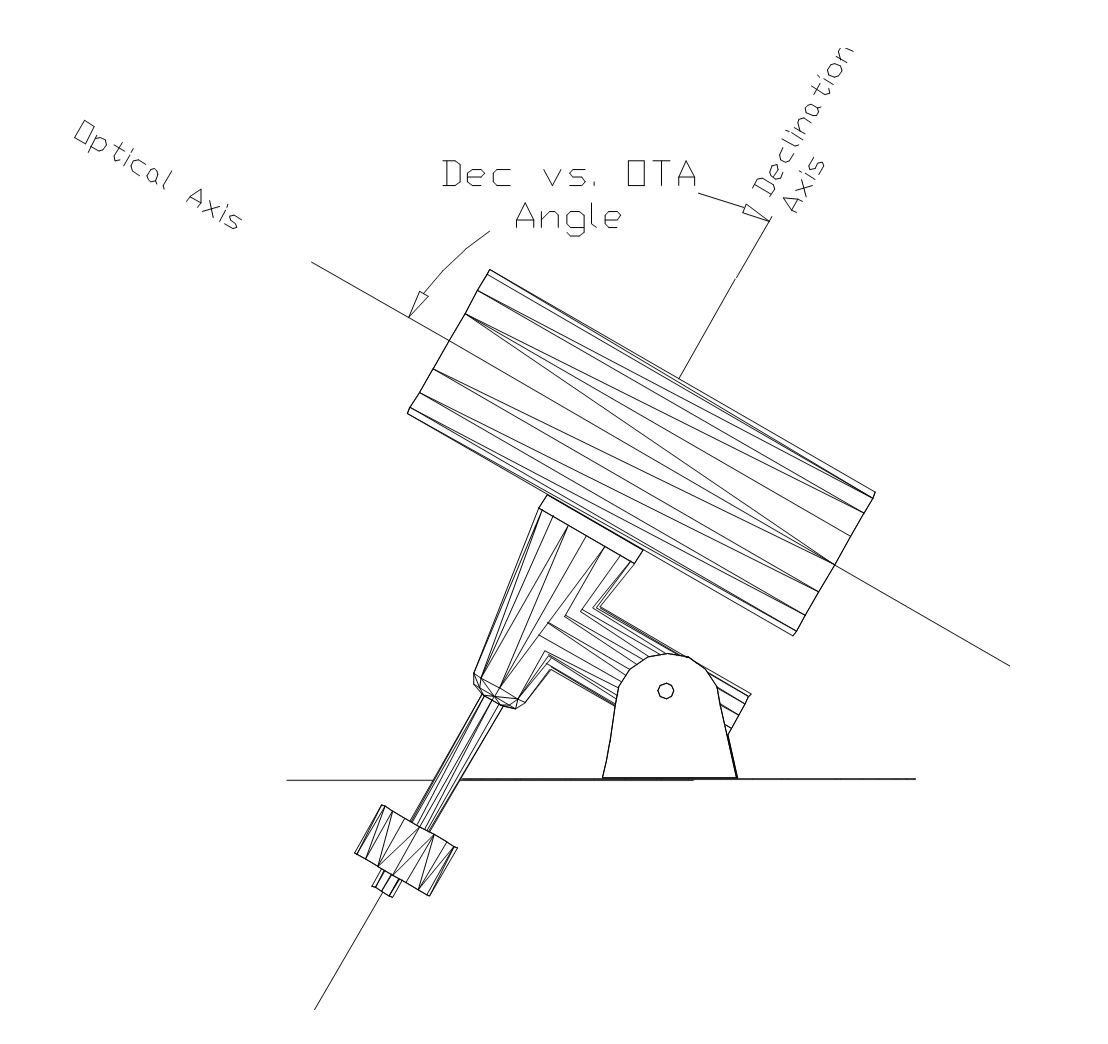
Figure 251: Side view of a German equatorial telescope mount.
After enough TPoint pointing samples are collected, the OTA/declination non-perpendicularity error is quantified, and if it is large, mechanical adjustments can be (but do not necessarily have to be) made to minimize the non-perpendicularity.
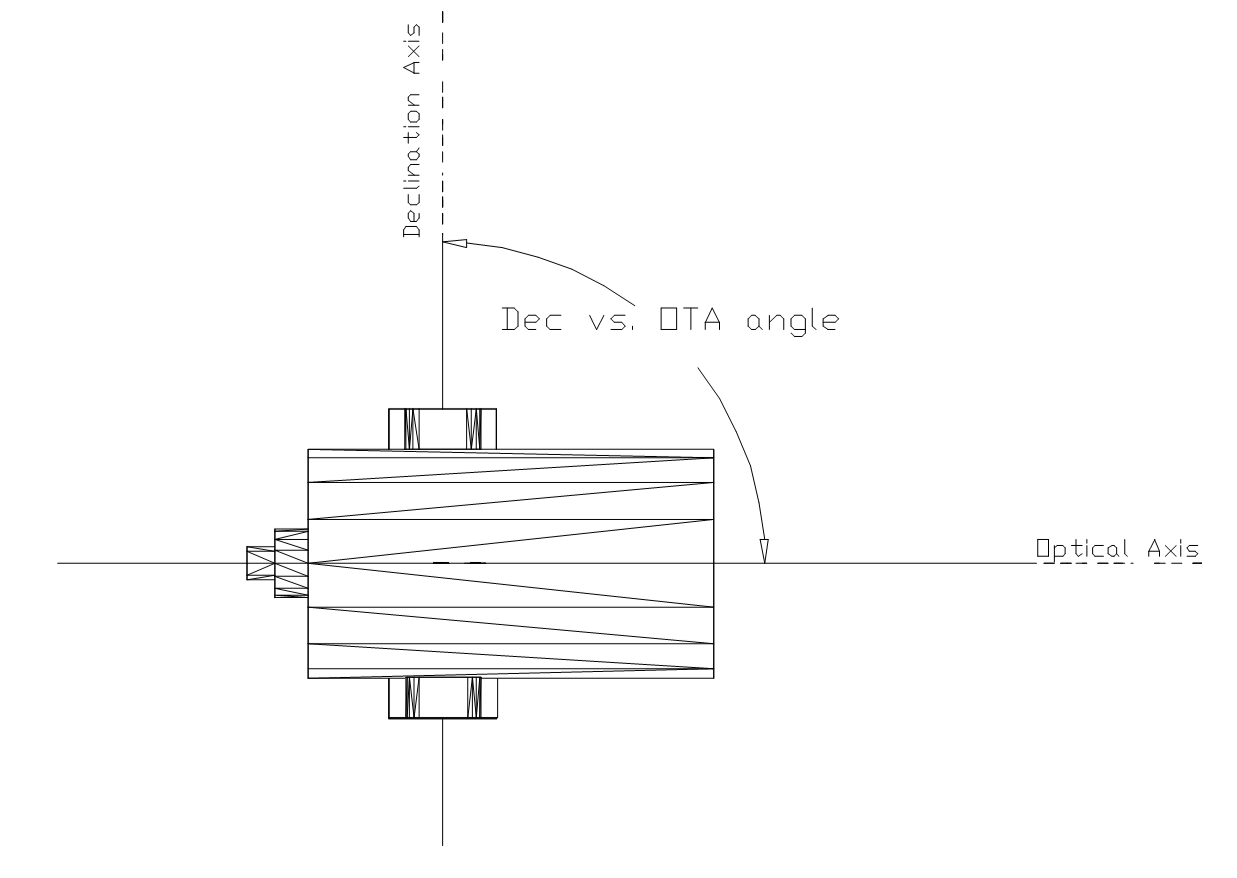
Figure 252: Declination axis vs. the optical angle.
While this source of pointing error can make centering stars difficult initially, it does not affect the tracking performance of the mount. In general, if the telescope is permanently mounted, and the pointing data can be collected automatically then no adjustment is necessary; once a model is established, TPoint will automatically correct for this error when the telescope is slewed. If the telescope is used in a portable setup, and stars are located visually, then you may wish to minimize this error so that unmodeled pointing is improved.
Change EW on the sky equal to coefficient CH. For a fork mount operating above the pole or for a GEM observing stars east of the meridian, positive CH displaces the pointing axis to the west of where it would otherwise be.
Note that CH and IH both move stars east or west in the field of view. The difference is that the displacement is constant for CH whereas the displacement due to IH shrinks as you approach the pole.
For north declinations, and for a fork mount operating above the pole, or for a GEM observing stars east of the meridian, positive NP displaces the pointing axis to the west of where it would otherwise be.
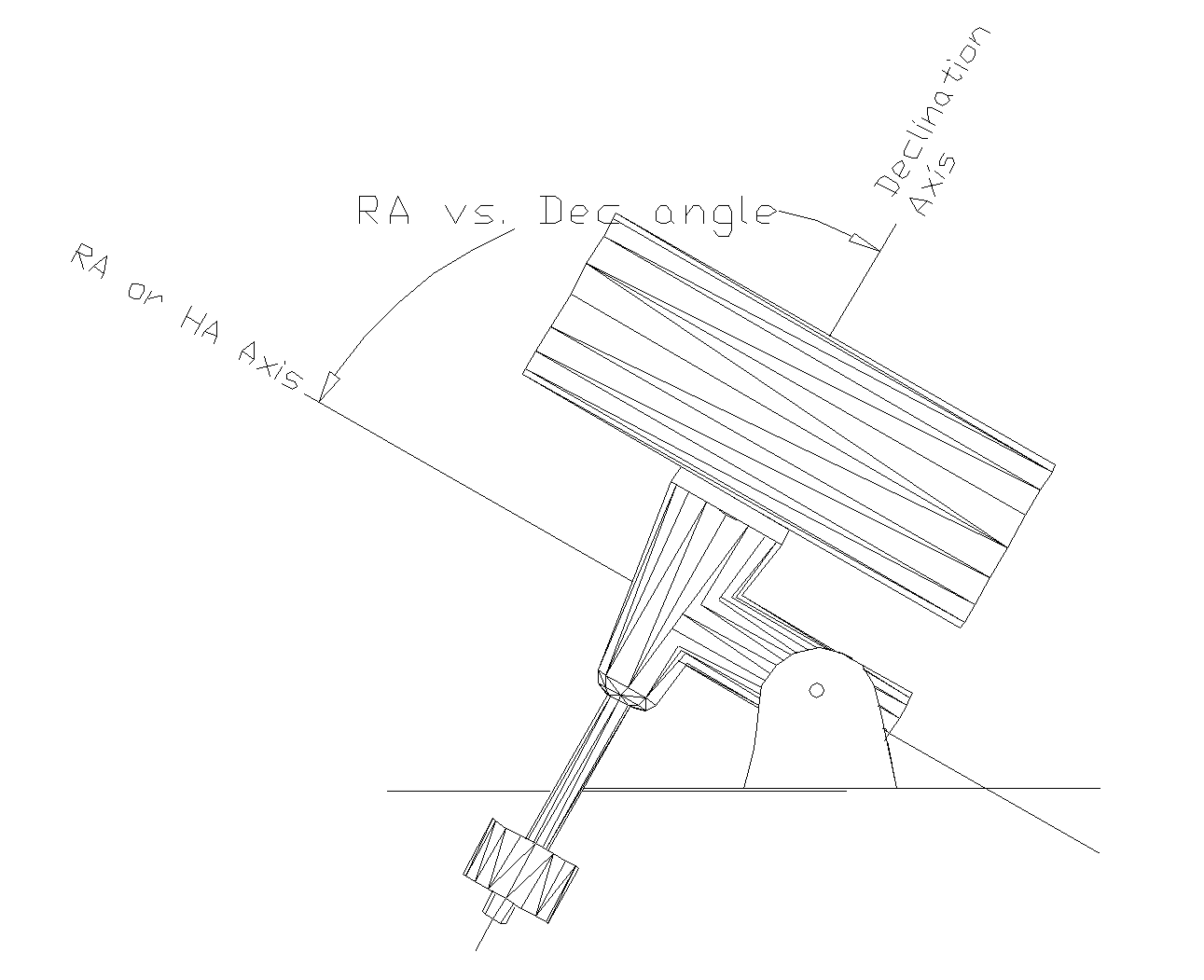
Figure 253: The side view of an equatorial mount.
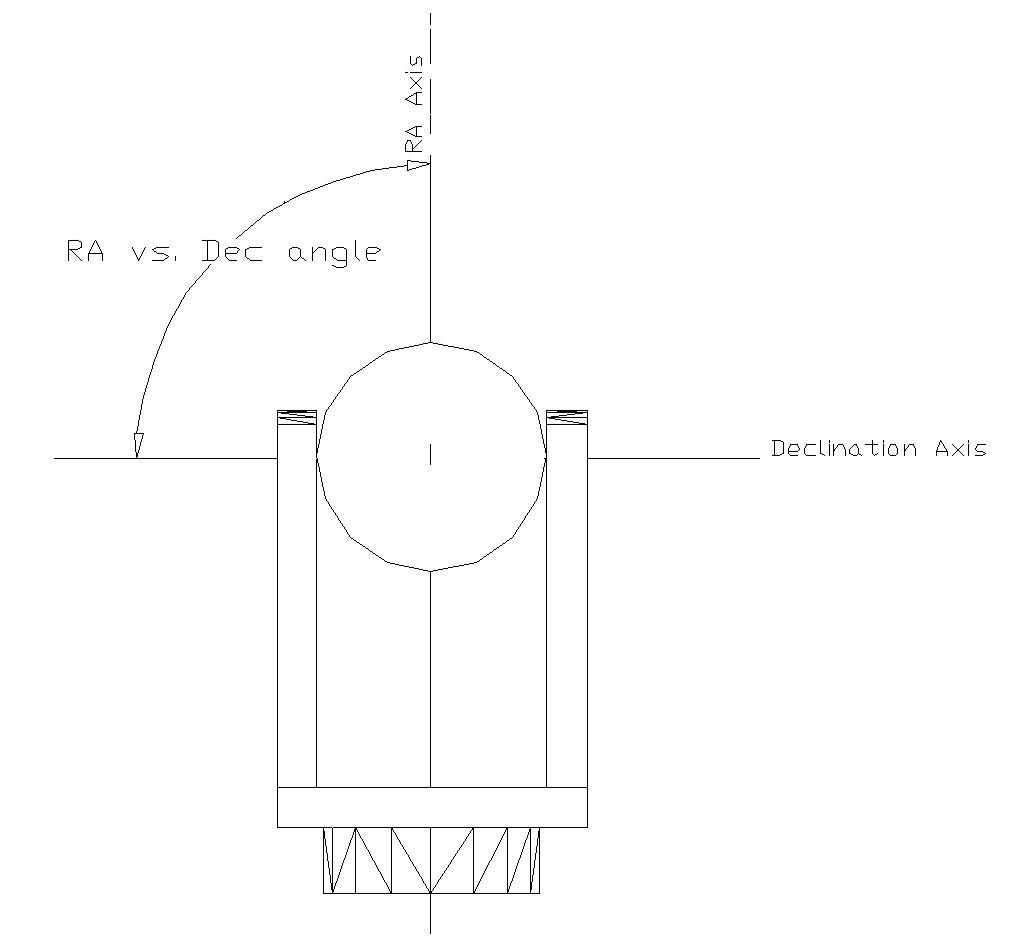
Figure 254: The front view of a fork mount.
In the Northern Hemisphere, a positive MA means that the pole of the mounting is to the right of due north. In the Southern Hemisphere, a positive MA means that the pole of the mounting is to the right of due south.
When adjusting correct for the MA term (polar misalignment in azimuth) you need to rotate about a vertical axis through a larger angle than MA itself. This is because MA is really a rotation about the point Hour Angle = 0, Declination = 0. The factor to inflate MA by before rotating the mount is 1/cos(latitude).
In the Northern Hemisphere, a positive ME means that the pole of the mounting is below the true (unrefracted) pole. A mounting aligned on the refracted pole will have a negative ME. In the Southern Hemisphere, a positive ME means that the pole of the mounting is above the true (unrefracted) pole. A mounting aligned on the refracted pole will have a positive ME.
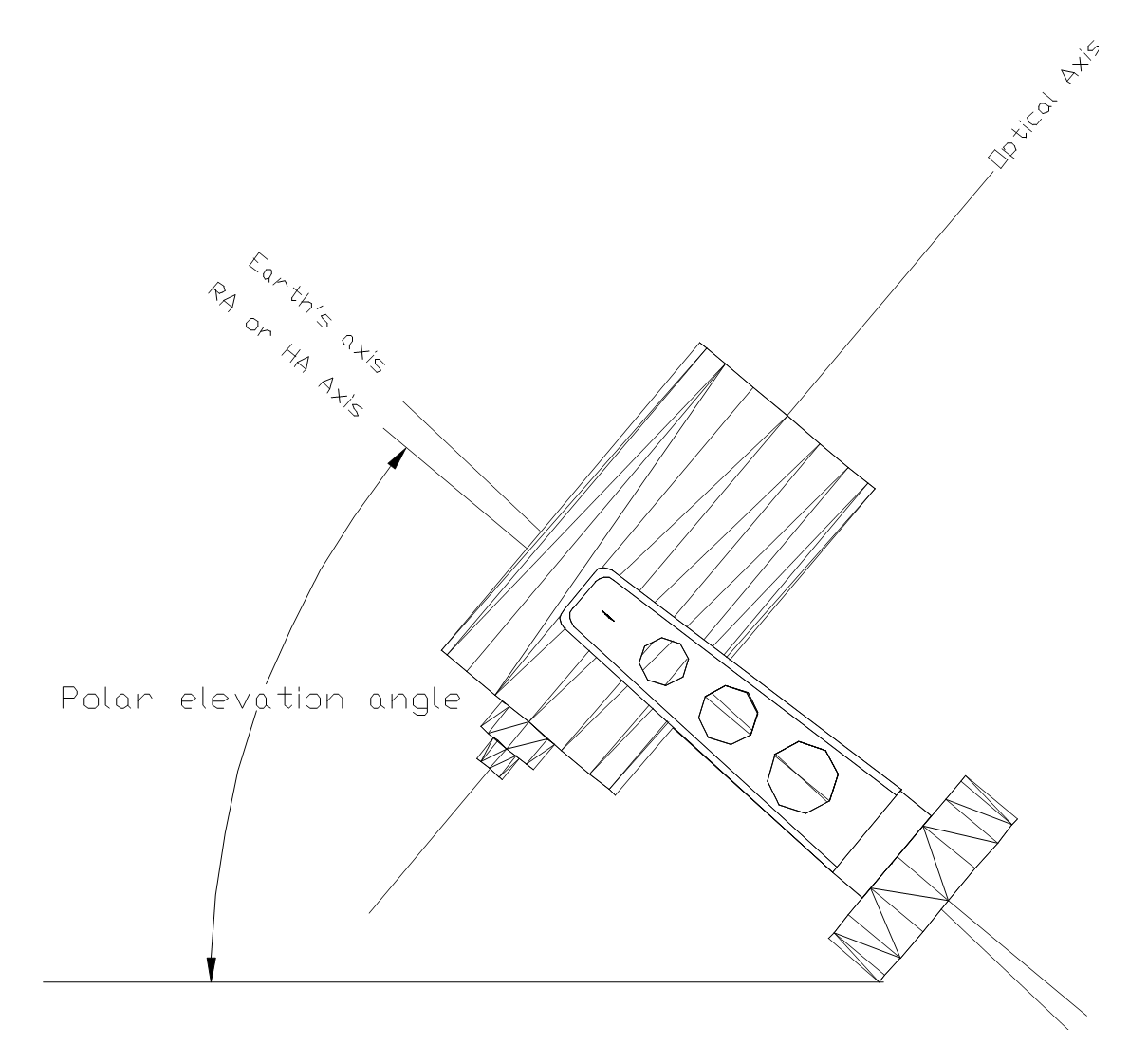
Figure 255: An equatorial fork mount (side view).
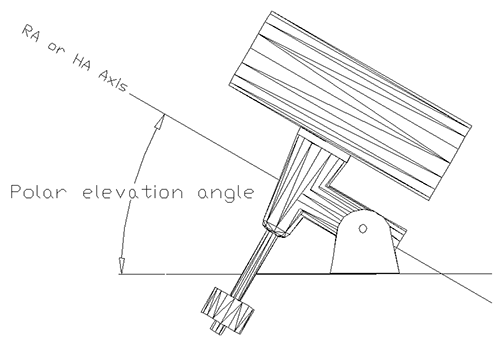
Figure 256: An equatorial mount.